Current Work:
The objective of my current work is to develop a self-training process, where a large group ("population") of small mobile robots can be evolved to perform specific tasks in a mutable environment, having autonomy to deal with their necessities. They are able to adapt to changes at the surroundings, modifying their internal configuration to work properly in a mutable environment.Our Team of Robots
I am building a population of twenty small mobile robots (six are already working) and their working domain where they can navigate, avoid obstacles, perform specific tasks, such as foraging and box-pushing, and look for a power supply to recharge their batteries. All robots have a genetic code (bits stored in a RAM memory) that specify the control device features. The control system is implemented within an embedded microprocessor (68HC11). The robots can navigate autonomously and try to perform the specified tasks, where, some times, they will need to receive help from the others to complete the assignment. The robots also attempt to find a "partner" to exchange genetic code and transform themselves into different robots (the parents are replaced by their offspring). Therefore, robots that are more adapted to perform the specified tasks have more spare energy to generate descendants. By the end of the process (if some threshold level is achieved), we usually have a few lost robots and a majority of well-adapted robots, qualified to work in the environment.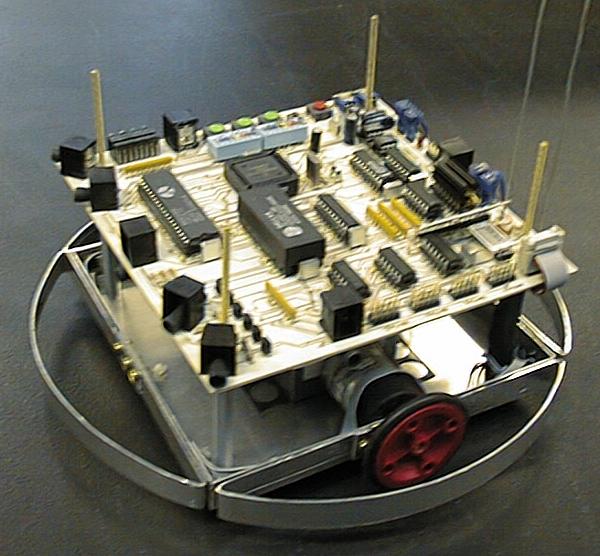
The prototype |
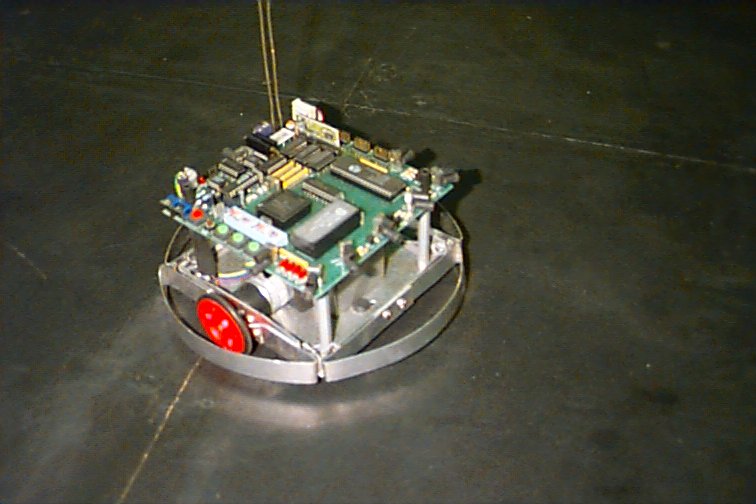
My pride and joy... |
Our Robotic Arm
I am also developing a robot arm to assist videolaparoscopic surgery, holding the camera and inserting it inside the pacient. The surgion can better operate using the more stable image provided.
My team working at
the Instituto de Cardiologia - Porto Alegre, Brazil
Our Intelligent Robot
Another projet I am supervising is the implementation of a facial recognition/object identification and voice recognition using a Nomad200 robot. The robot is able to identify its user and follow verbal commands to reposition and manipulate the specified object.
Click here to see my recent publications.
Click
here to access more Hardware Evolution Web links.